全国服务咨询热线:
15216837090
15216837090

机械的基础知识
1.机械的概念
机械是机构和机器的总称。我们在实际工程的领域中,常把具体的机械叫机器或机构,把机器中的机械运动系统叫机构。从功能变换的观点看,机构与机械有很大的区别。机器指用来根据某种使用要求而设计的一种执行机械运动的装置,而机构都是用来传递与变换运动和力的可动装置。
机械是用来传递运动或动力的能完成有用机械功的装置,用来变换或传递能量、物料与信息。其特点如下:
1)机械首先必须是执行机械运动的装置。
2)机械必须进行物料或信息的变换与传递,并完成有用的机械功。
3)机械中必须要完成能量的转换。
执行机械运动的装置是机械的主体,该部分是创新设计的重点内容。其运动方案部分相当于机械原理中的机构运动系统简图的设计。是否完成有用的机械功是辨别能否成为机械的关键条件。从机械学的角度看,电视机、计算机不是机械,这是因为它们的内部结构不是执行机械运动的装置,也没有克服外力作机械功。而剥线钳、手摇钻、门窗启闭的杆件系统等装置,因没有能量的转换,一般称之为机构,由于机构也是执行机械运动的装置,故纳入机械的概念中。根据机械的特点,还可把机械分为动力机、工作机和信息机。
动力机:一般也叫原动机,是一种把其它形式的能量转化为机械能的机械。按原动机转换能量的方式可分为三大类。
*类有三相交流异步电动机、单向交流异步电动机、直流电动机、步进电动机等,它们都是把能量转化为机械能的机器。
第二类有柴油机、汽油机、蒸汽机、燃汽机轮、原子能发动机等,它们都是通过燃煤、油、铀获得热能再转化为机械的机器。
第三类有水轮机、风力机、潮汐发动机、地热发动机、太阳能发动机等,它们都是把自然力转化为机械能的机器。
根据原动机输出的数学性质,还可以把原动机划分为线性原动机和非线性原动机。
当原动机输出的位移(或转角)函数为时间的线性函数时,称为线性原动机。如交、直流电动机是线性原动机。
当原动机输出的位移(或转角)函数为时间的非线性函数时,称为非线性原动机。如步进电机、伺服电机是非线性原动机。非线性原动机包括控制系统,也可作为线性原动机使用,其zui大特点可具有可控性。
弹簧力、重力、电磁力、记忆合金的热变形力都可以提供驱动力,但已不属于原动机的范畴。
工作机:工作机是指利用原动机提供的动力实现物料或信息的传递,克服外载荷而作有用机械功的机械。大部分机械都是工作机,工作机中必须包含原动机。否则,只能称为机械装置。汽车、起重运输等机械通过搬运物料而作机械功,各类金属加工机床也是通过物料的传递或转移而作机械功。原动机的种类有限,而工作机的种类却是多种多样。由于工作机是完成各种复杂动作的机械,它不仅有运动精度的要求,也有强度、刚度、安全性、可靠性的要求。
信息机:信息机也是一种工作机,只不过是通过各种复杂的信息来控制机械运动。如打印机是通过计算机的指令来控制打印工作的,绘图机、复印机、传真机、收音机都是信息机。
2. 机械的组成
掌握机械的组成我们可以参照图2-1所示的机械组成的示意图。
图2-1 机械组成的示意图
如上图所示,机械一般由原动机、机械运动系统、控制系统和辅助系统组成。机械运动系统可以是单一的工作执行机构,也可以是由机械传动机构和工作执行机构的组合。控制系统可以是手柄、按钮式的简单装置或电路,也可以是集微机、传感器、各类电子元件为一体的强、弱电相结合的自动化控制系统。
控制系统可以是原动机直接进行控制,也可以通过控制元件对传动机构或工作机构进行控制。
a) b) c)
图 2-2 无转动机构的机械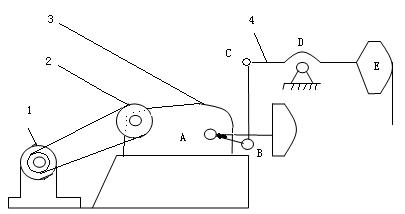
图2-3 油田抽油机机构简图
1—电动机 2—带传动 3—减速箱4—ABCDE 为连杆机构
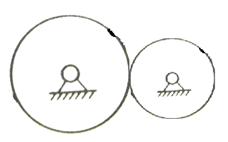
工程中,有些机械没有传动机构,而是由原动机直接驱动执行机构。如水利发电机组、电风扇、鼓风机以及一些用直流电动机驱动的机械,都是没有传动机构。随着电机调速技术的发展,无传动机构的机械有增加的趋势。图2-2所示为机械中没有传动机构。
图2-2a为水力发电机,图2-2b为鼓风机,图2-2c为二坐标机床的工作台。
具有传动机构的机械占大多数。图2-3所示的油田抽油机就是具有代表性的机械。
图2-3中,带传动与齿轮减速箱为传动机构,起缓冲、过载保护、减速的作用。连杆机构ABCDE为执行机构,圆弧状驴头通过绳索带动抽油杆往复运动。
3. 机械运动系统
机械运动系统主要指机械中的传动机构和工作执行机构,从机构学的角度看问题,二者是相同的,只不过在机械中所起的作用不同。有些机械中有时很难分清传动机构和执行机构,故二者统称为机械运动系统。机械运动系统可以是机构的基本型,也可以是机构的基本型的机构组合或组合机构。
1) 机构的基本型
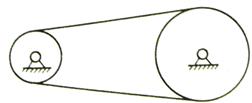
机构的基本型是指zui基本的、zui常用的机构型式。目前,zui常见的机构有连杆机构(图2-4a)、凸轮机构(图2-4b)、齿轮机构(图2-4c)、带传动机构(图2-4d)、蜗杆传动机构(图2-4e)等,由于基本型的确定原则尚无确切说明,这里就不再对这些常见机构进行划分了。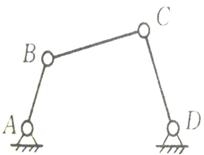

a) b) c)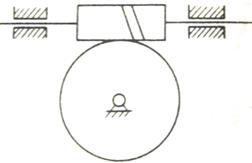
d) e)
图2-4 常见机构类型
2) 机构的组合
形象的来说,机构就是一部机器的骨骼图,在实际应用中,单一的机构经常不能满足不同工作的需要。把一些基本机构通过适当的方式连接起来,从而组成一个机构系统,称为机构的组合。在机构的组合系统中,各基本机构都保持原来的结构和运动特性,都有自己的独立性。在机械运动系统中,机构的组合系统应用很广泛。
例如,图2-5所示的铁板运输机中,定轴齿轮1把运动传递给齿轮2,定轴齿轮1上的曲柄通过连杆机构ABCD把运动传递给系杆H。齿轮2、3、4与系杆H构成一个差动轮系,该轮系的两个输入均为主动轮1提供,zui后由齿轮3输出。可见,该系统中的连杆机构和差动轮系机构都没有因为互相连接而影响自己的机构特性。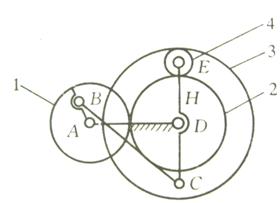
图2-5
我们创新设计机构时,要把握机构组合系统中的各机构均保持其原来的特性的原则,应该对机构组合系统中的各个机构进行独立的分析与设计。
3) 组合机构
在分析创新设计类型时,我们知道有一种创新叫组合创新设计。组合机构就包含其中,它是机构创新的重要方法之一。
我们首先应该清楚,组合机构是指若干基本机构通过特殊的组合而形成的一种具有新属性的机构,可见,它与与机构组合有本质的不同。组合机构中的各基本机构已不能保持各自的独立性,所以我们就不能用原基本机构的分析和设计方法进行组合机构的设计。每种组合机构都有各自的分析和设计方法。
常见的组合机构有齿轮—连杆组合机构、齿轮—凸轮组合机构、凸轮—连杆组合机构。组合机构常用于完成复杂运动的机械系统中。如图2-6所示的齿轮连杆组合机构,它就是实现较复杂运动轨迹的机械系统。其中的五杆机构ABCDE的两个输入运动是通过齿轮1、2的运动来实现的,适当的选择机构尺寸与齿轮传动比,可得到预定的连杆曲线。
图2-6 齿轮连杆组合机构
4. 机械的控制系统
随着机械行业的不断发展控制系统在机械中的作用也越来越突出,我们在进行机械创新设计时也可以将思维转移到这一领域,用自动化甚至智能化的控制系统来代替传统的手工操作。
目前机械设备中的控制系统常见的有:机械控制、电气控制、液压控制、气动控制及综合控制。其中以电气控制的应用,与其它控制形式相比有很多优点。
电气控制系统的特点是:体积小,操作方便,无污染,安全可靠,可进行远距离控制。其原理和方法是:通过不同的传感器可把位移、速度、加速度、温度、压力、色彩、气味、等物理量的变化转变为电量的变化,然后由控制系统进行处理。
由于计算机技术和自动控制技术的发展,现代机械的控制系统更加先进、复杂,可靠性也大大增加,可对运动时间、运动方向与位置、速度等参数进行准确的控制。
总之,现代的机械控制系统集计算机、传感器、接口电路、电器元件、光电元件、电磁元件等硬件环境及软件环境为一体,而且正向自动化、精密化、智能化、高速化的方向发展,其安全性、可靠性的程度不断提高。在机电一体化机械中,机械的控制系统将起更加重要的作用,我们应该重视在这一领域的创新设计。
2.5.2 机械系统及其发展
1. 机械系统的基本组成形式
根据原动机、传动机构、执行机构的不同组合以及机械系统运动输出特性
的不同,机械系统的基本组成形式见表2-1所示。
表2-1中的线性机构是指机构传动函数为线性函数的机构。如齿轮机构、螺旋传动机构、带传动机构及链传动机构等都是线性机构。而机构传动函数为非线性函数的机构,则称为非线性机构。如凸轮机构、连杆机构、间歇运动机构等则是非线性机构。
类型1和2是zui基本、zui常见的机械系统。如电动卷扬机属类型1,鄂式破碎机属类型2。类型5在数控机床、机器人等自动机械中得到了广泛的应用。其它类型则少见其应用。
表2-1 机械系统的基本组成形式
| 类 型 编 号 | 原动机 | 传动机构 | 执行机构 | 机械系统的输出运动 | ||||
| 线性原动机 | 非线性原动机 | 线性机构 | 非线性机构 | 线性机构 | 非线性机构 | 简单机构 | 复杂机构 | |
| 1 | √ | √ | √ | √ | ||||
| 2 | √ | √ | √ | √ | ||||
| 3 | √ | √ | √ | √ | ||||
| 4 | √ | √ | √ | √ | ||||
| 5 | √ | √ | √ | √ | ||||
| 6 | √ | √ | √ | √ | ||||
| 7 | √ | √ | √ | √ | ||||
| 8 | √ | √ | √ | √ | ||||
电话
微信扫一扫

 当前位置:
当前位置: